Portfolio item number 1
Short description of portfolio item number 1

Short description of portfolio item number 1
Short description of portfolio item number 2
Published in , 2022
To fully perceive the surrounding environment, many intelligent robots and self-driving cars are equipped with a multi-camera system. We propose tailor-made multi-camera based motion averaging system that calibrates and fuses the rigged constraints automatically. Experiments demonstrate that our algorithm achieves superior accuracy and robustness on various data sets compared to the state-of-the-art methods. 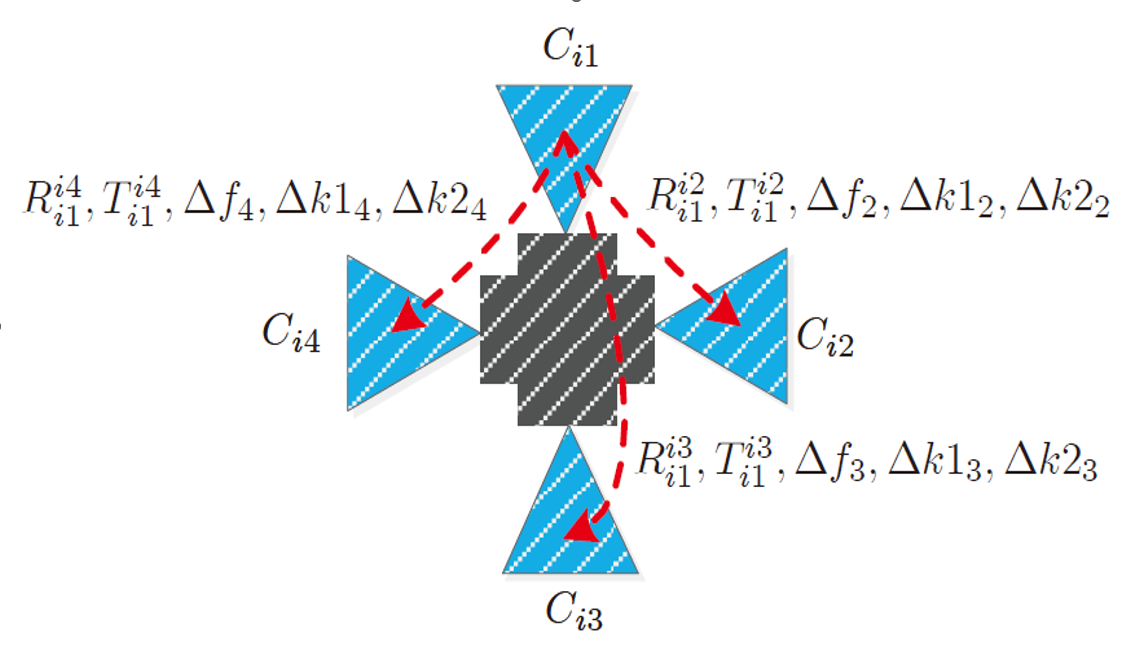
Download here
Published:
To fully perceive the surrounding environment, many intelligent robots and self-driving cars are equipped with a multi-camera system. We propose tailor-made multi-camera based motion averaging system that calibrates and fuses the rigged constraints automatically. Experiments demonstrate that our algorithm achieves superior accuracy and robustness on various data sets compared to the state-of-the-art methods.
Download here
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.